Schematic review needed - robotic project.
Posted: Fri Jan 04, 2019 4:55 pm
Hi
I have a long-term hobby project, to build a robot that can do something that is very boring for a human - placing SMD components.
I have built a machine from scratch, including the electronics and software. Everything is open-source - but is work in progress.
So far, the explorer KIT has been used with different daughter cards connected to it.
I would appreciate if someone could check my XTAG, Xlink connections etc. on the new "CPU" board. The board is intended to be connected in a galvanic isolated XLink network, for an example like this
https://github.com/lilltroll77/XMOS-XU2 ... etwork.pdf or
https://github.com/lilltroll77/XMOS-XU2 ... etwork.pdf
The networks above run in the xTIMEcomposer simulator without errors.
The PCB's can either be populated as a hub with USB, and a Gigabit ethernet shield, or as a network node that runs
FOC SVPWM for BLDC (Field-oriented control combined with Space Vector Pulse Width Modulation for Brushless DC Motors) by connecting a daughter card/shield power by the 48V motor rail.
USB ground will be isolated from power ground.
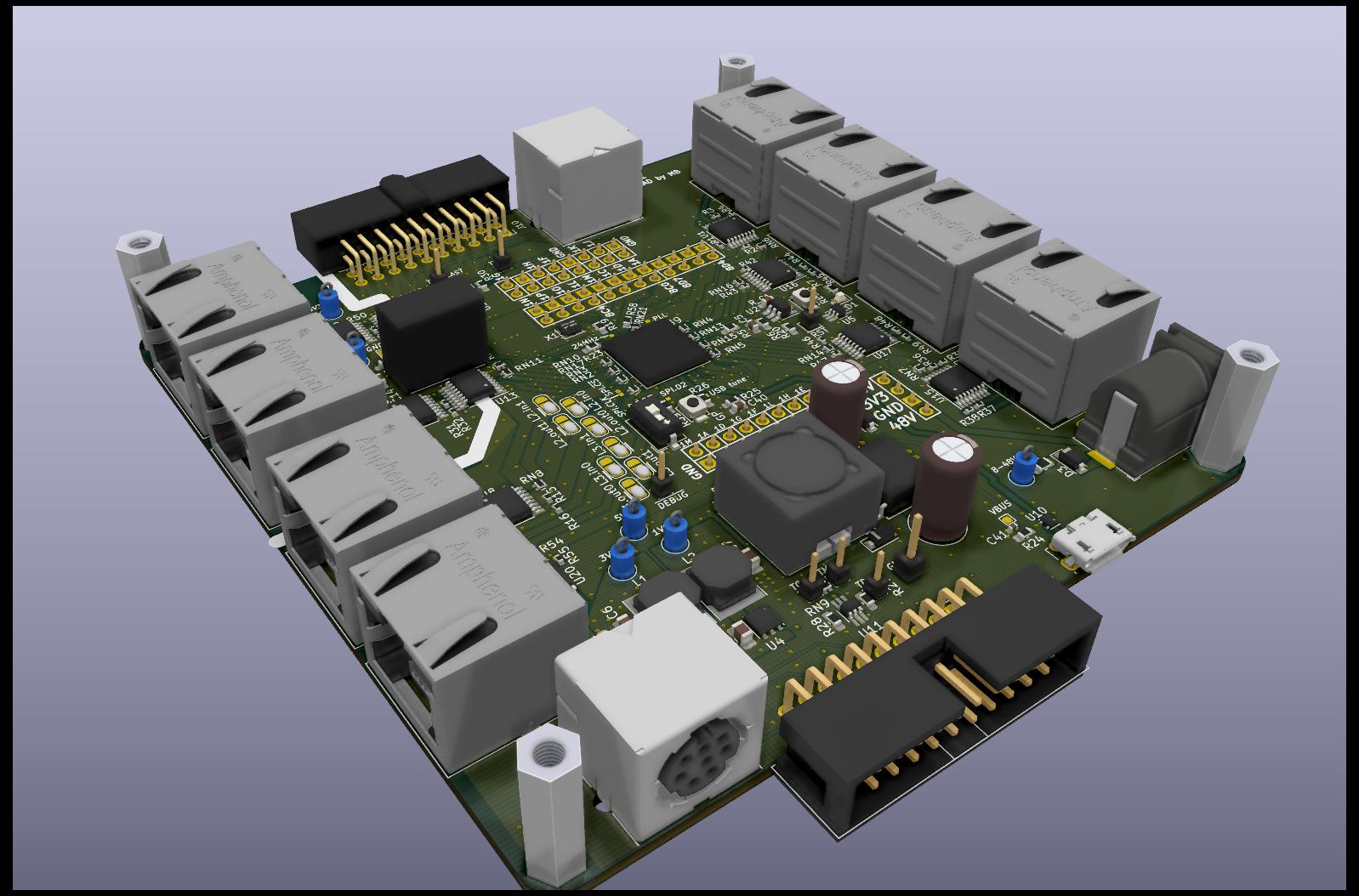
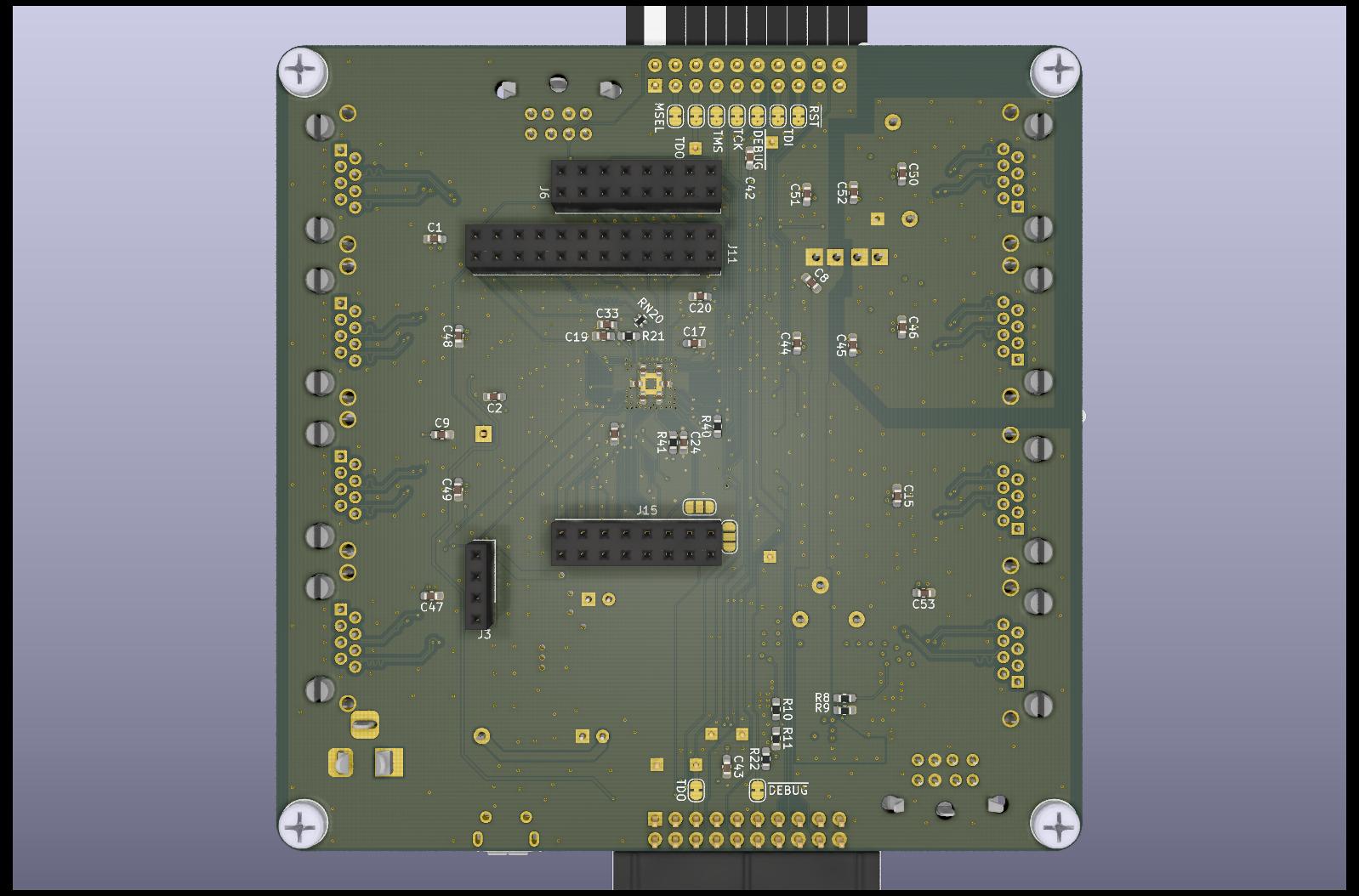
Schematic, board layout and virtual reality files can be found here.
https://github.com/lilltroll77/XMOS-XU216_FB236-BOARD
---------------------------------------------------------------------------
Here is an old video when using the eXplorer KIT + stepper motors + the machine itself.
https://www.youtube.com/watch?v=MYEp6bmtVj4
https://www.youtube.com/watch?v=U8llYMeUdWE
https://www.youtube.com/watch?v=jBj-VGELGH0
First BLDC version can be found here with eXplorer KIT.
https://workspace.circuitmaker.com/Proj ... put-driver
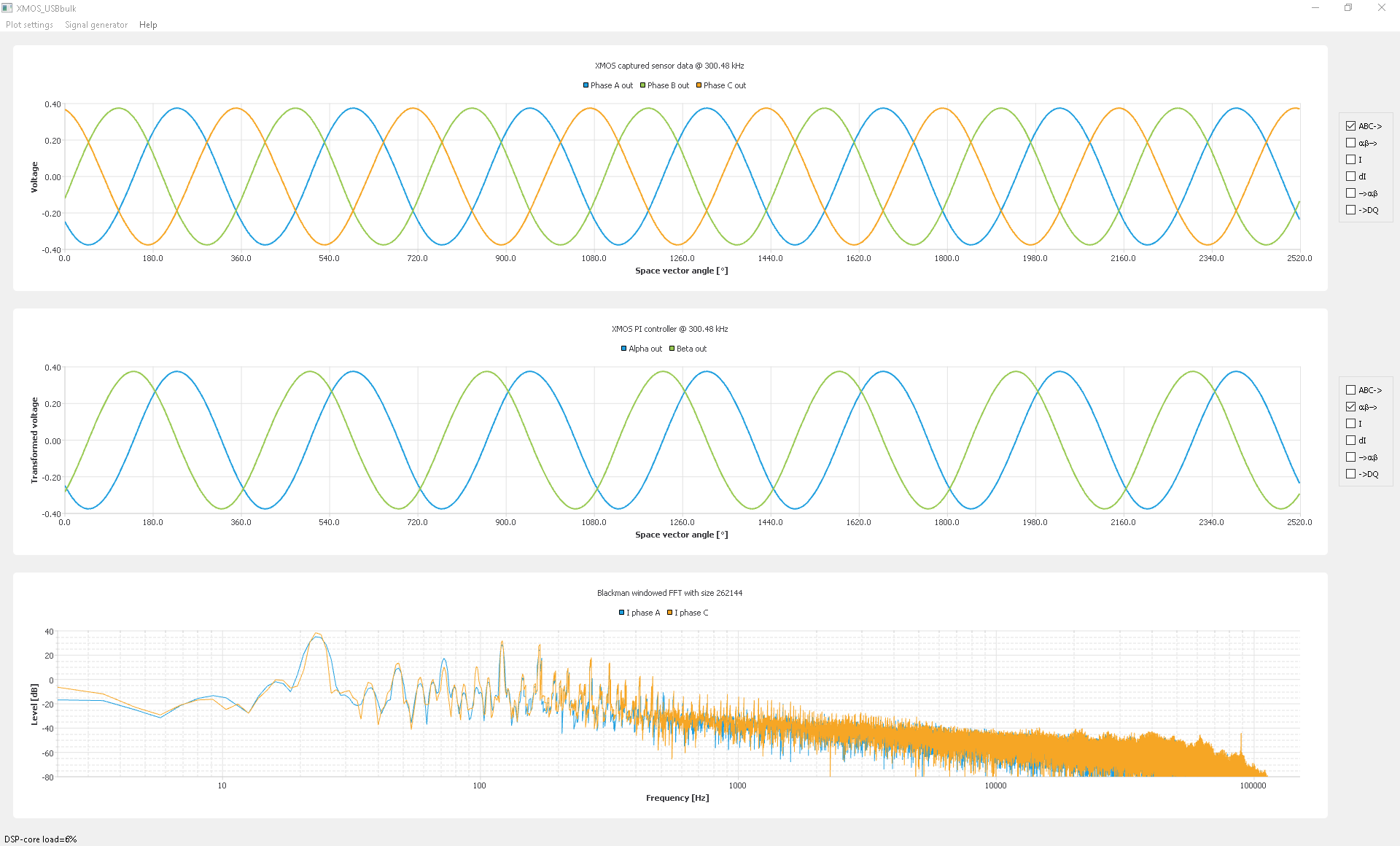
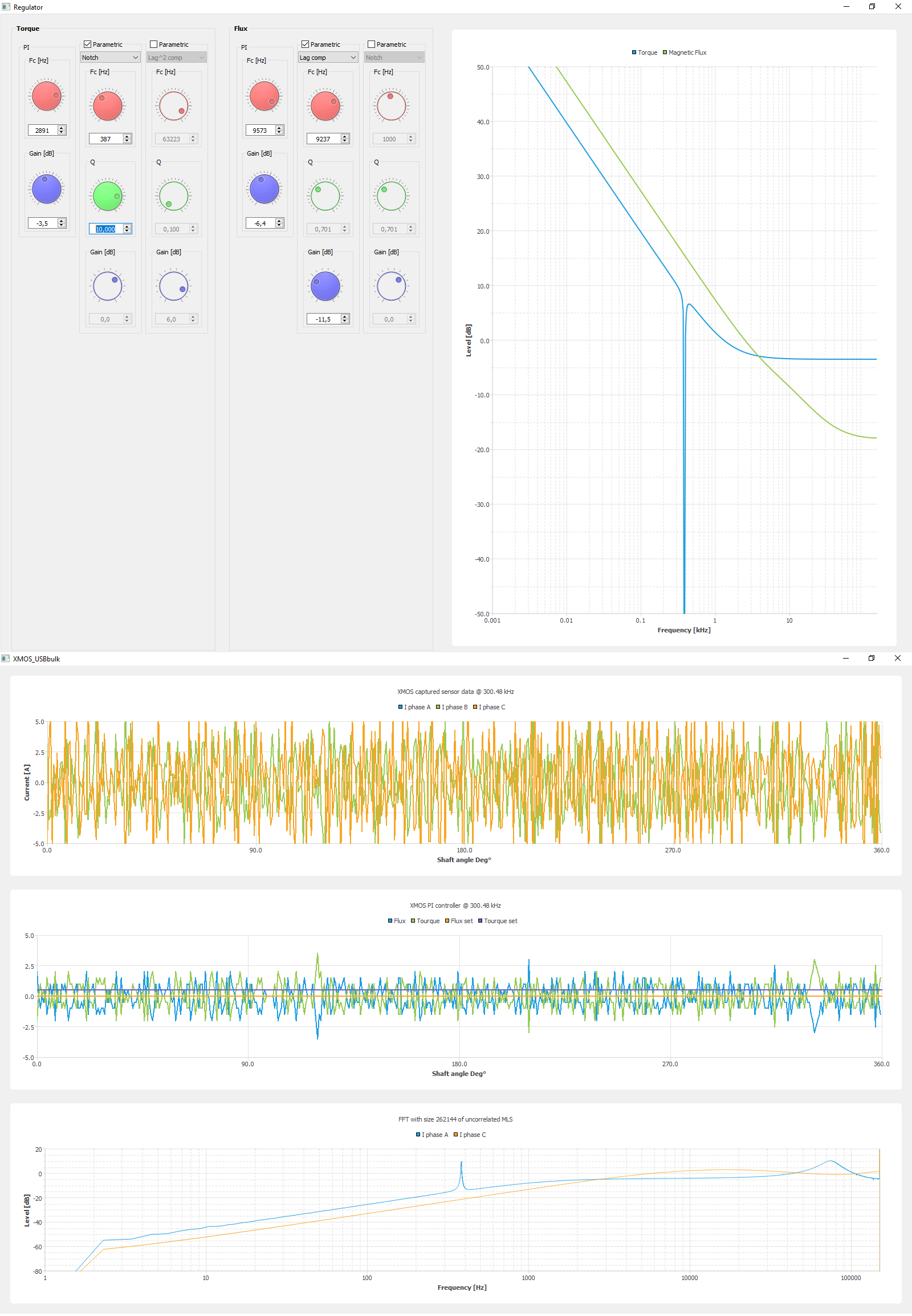
There is also a large GUI on the host side written in Qt (C++). Below is 2 early pictures. XMOS streams ~ 10Mbyte/s of controller real-time data to the host over a custom bulk USB driver.
GCODE for moving the robot is created by the http://openpnp.org/ software which also uses machine vision.
I have a long-term hobby project, to build a robot that can do something that is very boring for a human - placing SMD components.
I have built a machine from scratch, including the electronics and software. Everything is open-source - but is work in progress.
So far, the explorer KIT has been used with different daughter cards connected to it.
I would appreciate if someone could check my XTAG, Xlink connections etc. on the new "CPU" board. The board is intended to be connected in a galvanic isolated XLink network, for an example like this
https://github.com/lilltroll77/XMOS-XU2 ... etwork.pdf or
https://github.com/lilltroll77/XMOS-XU2 ... etwork.pdf
The networks above run in the xTIMEcomposer simulator without errors.
The PCB's can either be populated as a hub with USB, and a Gigabit ethernet shield, or as a network node that runs
FOC SVPWM for BLDC (Field-oriented control combined with Space Vector Pulse Width Modulation for Brushless DC Motors) by connecting a daughter card/shield power by the 48V motor rail.
USB ground will be isolated from power ground.
Schematic, board layout and virtual reality files can be found here.
https://github.com/lilltroll77/XMOS-XU216_FB236-BOARD
---------------------------------------------------------------------------
Here is an old video when using the eXplorer KIT + stepper motors + the machine itself.
https://www.youtube.com/watch?v=MYEp6bmtVj4
https://www.youtube.com/watch?v=U8llYMeUdWE
https://www.youtube.com/watch?v=jBj-VGELGH0
First BLDC version can be found here with eXplorer KIT.
https://workspace.circuitmaker.com/Proj ... put-driver
There is also a large GUI on the host side written in Qt (C++). Below is 2 early pictures. XMOS streams ~ 10Mbyte/s of controller real-time data to the host over a custom bulk USB driver.
GCODE for moving the robot is created by the http://openpnp.org/ software which also uses machine vision.